Project Description
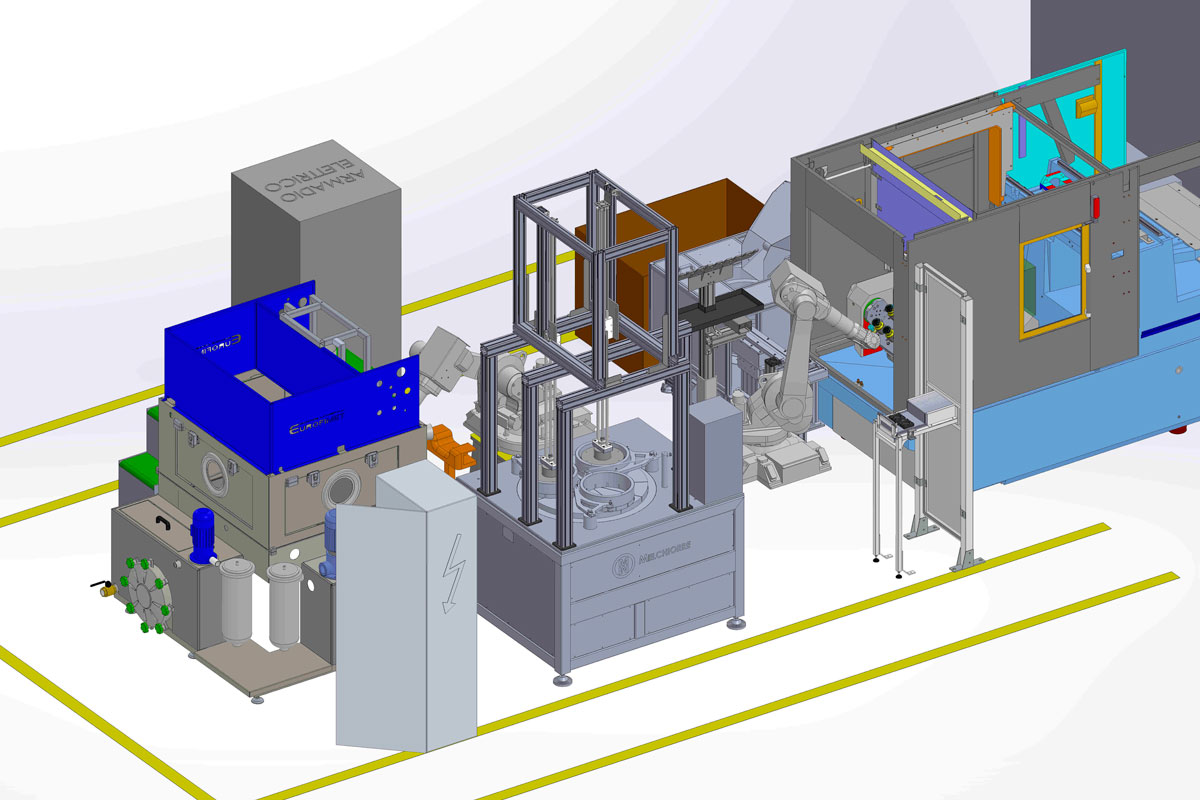
The purpose of this type of cell is to handle the piece directly from a vibrating system or from a conveyor downline of the vibrating system.
If necessary, the piece can be inspected by means of a fixed video camera or a camera mounted directly on the robot’s pitch.
This type of cell allows to produce without a constant supervision, since a prolonged autonomy is provided.
Recommended applications::
- Short processing cycle time, when the operator has difficulty loading the conveyor belt.
- Need for production without plant general management.